How UNO is Pushing the Parameters of Exo and Prosthetic Research
Researchers at UNO are uncovering fundamental biomechanics principles to assist critical patient populations, and Humotech is helping.
- published: 2021/03/16
- contact: UNO Biomechanics - College of Education, Health, and Human Sciences
- email: unobiomechanics@unomaha.edu

This article was originally a blog post published by Humotech, a spin-off company from Carnegie Mellon University's Experimental Biomechatronics Laboratory producing robotic prostheses & exoskeletons for research & development.
By Danielle Commisso, danielle.commisso@humotech.com
Search for prosthetics and exoskeletons on YouTube and you're bound to land on some exciting prototypes being dreamed up and brought to life. While this tends to be what reaches the public eye when it comes to these technologies, rarely do you see or hear about all of the hard work going on behind the scenes, particularly the research in biomechanics principles.
Yet it's precisely this scientific research that is critical to moving the field forward, in particular, to enable clinically-feasible solutions to help people with certain disabilities and diseases.
Also, it’s just cool. To get a glimpse into some of that research being done today and how researchers are tackling fundamental challenges in the field, head over to the Department of Biomechanics at the University of Nebraska at Omaha (UNO). In the teams of Philippe Malcolm, PhD and Kota Takahashi, PhD, researchers from around the world are working together to discover biomechanical principles to help create better and new prosthetic and exoskeleton devices. And they’re using Humotech’s Caplex™ systems to help do that.
Kota Takahashi, Ph.D. and Philippe Malcolm, Ph.D.
Prosthetics to Navigate the Day-to-Day
For example, Takahashi and his team are uncovering fundamental principles governing mechanics and energetics of human locomotion, with the goal of improving the design and prescription of prosthetics. If you’re a researcher or clinician in the field, you’re probably familiar with the challenges people with amputation face. In short, current commercially available foot prostheses have limitations that can be problematic for patients. One of those is high metabolic cost; prosthesis wearers often end up using more energy (i.e. metabolic cost) to do things that healthy people can easily do, typically relying on the hip and other muscles to compensate for the lack of ankle power. They run a greater risk of developing osteoarthritis because of this overcompensation.
To help these patients, researchers like Takahashi are looking to better understand the complex and nuanced relationships between different biomechanical properties of gait. One of his ongoing lines of research involves studying ankle joint stiffness and metabolic cost.
Research suggests that reducing ankle joint stiffness in prosthesis wearers reduces the energy demands during normal walking. But, what happens when weight is added during normal everyday activities, such as wearing a backpack or carrying bags of groceries?
In research terms, how does ankle stiffness affect metabolic cost during walking with extra load? That was one question that hadn't yet been answered when Takahashi’s team set out to study it in 2017.
"One of the biggest challenges in the field is trying to optimize the prosthesis for a variety of walking tasks that we may encounter on a day-to-day basis," Takahashi says. Yet, he explains that actually being able to carry out research on more complex walking tasks is difficult. Researchers face logistical challenges that are timely, costly, and limiting. For example, to be able to test a large number of prosthesis properties at once—such as testing how varying degrees of foot stiffness affects the energetics of gait—his team would need to use a different prosthesis every time they wanted to switch properties.
Those challenges prompted Takahashi to search for alternative ways to test biomechanical properties of gait, leading him to acquire a Caplex system from Humotech (in fact, UNO was Humotech’s first customer to receive a full Caplex system). In the study on ankle stiffness and metabolic cost with load, doctoral student Erica Hedrick—then a graduate student in Takahashi’s lab—carried out testing using Caplex with healthy subjects. Malcolm was also a collaborator on the study. The team used a Humotech immobilizer boot to emulate an elastic prosthesis and rapidly tested different parameters of ankle stiffness with and without load.
The results? Interestingly, they found there was no significant interaction between stiffness and load on metabolic energy cost, which was counterintuitive to what they had hypothesized. (Check out their full research findings published in the Journal of NeuroEngineering and Rehabilitation).
Erica Hedrick presenting her research on ankle foot stiffness and metabolic cost
To Takahashi, the counterintuitive findings just further reinforce the importance of carrying out this kind of research--and he notes that having the means to do it is an exciting prospect, "One of the neat things about the system that we have is that if we can think of the experiment, and we can think of the prosthesis properties to simulate, then we can do it."
With a proof of concept in place, Takahashi plans to carry out future studies that combine Caplex and UNO’s resources to test walking in a variety of other kinds of conditions (such as on an incline or rough terrains).
Hip Exoskeletons to Assist PAD Patients
Philippe Malcolm’s team is also investigating metabolic cost and fundamental principles of biomechanics, but with an eye toward exoskeletons. In fact, Malcolm developed the first tethered ankle exoskeleton capable of reducing metabolic cost, helping to pave the way for further research. At UNO, he is a sub-project leader at the Center for Research in Human Movement Variability (MOVCENTR), which supports studying movement related disorders. His team focuses on using biomechanics to optimize wearable robots for a wide range of applications.
One of their most recent applications investigates using exoskeletons to improve mobility for patients with Peripheral Artery Disease (PAD). Affecting more than 8 million people in the U.S. over the age of 40, PAD can cause weakness in the legs and reduce the mobility of affected individuals, caused by decreased blood flow and oxygen to the lower extremities as the result of systemic atherosclerosis. People with PAD can experience pain in the legs and ankles after just a few minutes of walking, and left untreated PAD can increase the risk of amputation.
Previous biomechanics research shows that PAD causes reduced ankle joint power in patients—but it also causes reduced hip joint power. Data from a recent musculoskeletal simulation study from Malcolm’s group suggest that the metabolic cost of the hip during walking is actually greater than that of the knee or ankle. That presents an intriguing opportunity to maximize metabolic cost reduction. While some have conducted research on the use of ankle exoskeletons for PAD patients, Malcolm’s team is among research groups investigating whether a hip exoskeleton is more effective. Another advantage of a hip exoskeleton over an ankle exoskeleton is that it avoids contact with the lower legs, where PAD patients are at risk of developing ulcers.
In a pilot study, the team used a Caplex system and machinery they developed to optimize the performance of a hip exoskeleton during walking with promising results, choosing to study the properties of a semi-rigid exoskeleton. Arash Gonabadi, a doctoral student on Malcolm’s team, presented the study’s findings at the 2020 Human Movement Variability Conference and Great Plains Biomechanics Conference. (Watch the presentation here.) This first phase of research was conducted with healthy individuals, while the next (second) phase of research will be carried out with PAD patients in a clinical setting, notes Gonabadi.
Interesting #hip#exoskeleton powered by #Caplex in action at @UNOmaha. Philippe Malcolm, Arash Mohammadzadeh Gonabadi & the @UNOBiomechanics team are exploring a hybrid exosuit/exoskeleton design to assist folks with peripheral artery disease walk with less effort. #Biomechanicspic.twitter.com/n3UbtGeI4Z— humotech (@humotech) December 15, 2020
Malcolm’s team is also continuing to study how to improve metabolic costs of different phases of the gait cycle through using Caplex and a novel waist-end effector that they’ve developed. In this setup, a user walks on a treadmill with a tethered band around the waist that assists walking by "pulling." As Malcolm noted in 2019, using Caplex enables experiments that were not possible before, such as applying perturbations to different phases of the gait cycle. While it doesn’t lend itself to mobile operation, one significant application of this robotic-assisted waist-pulling system could be in rehabilitation or therapeutic interventions for patient populations that have high increases in metabolic cost, such as children with cerebral palsy, and for whom traditional exoskeletons may not be as effective. Watch a quick video that the team presented at the Dynamic Walking Conference in 2018 to learn more.
Gonabadi sees the potential of Caplex systems to be used in additional studies with patients with brain and spinal cord injuries and amputation. He hopes to engage Humotech at the clinical level and bring testing machinery to the Madonna Rehabilitation Hospitals in Omaha, where he serves as Assistant Research Director of the Rehabilitation Engineering Center of Excellence.
Stepping Into the Future
Being able to offer solutions to researchers like Malcolm and Takahashi and their teams is what Humotech is all about.
"We provide tools so that biomechanics researchers can focus on their goals without getting mired in robotics engineering," Josh Caputo, President and CEO of Humotech, says.
The partnerships with Malcolm and Takahashi extend back to the beginnings of Humotech; the researchers established their teams at UNO at around the same time Humotech was forming as a company. Caputo credits their collaboration with helping Humotech get off the ground, "Their work is inspiring from a scientific standpoint, and together they are a major reason why Humotech exists at a company. We've been through countless 'firsts' together, and we're so appreciative of them taking the leap with us."
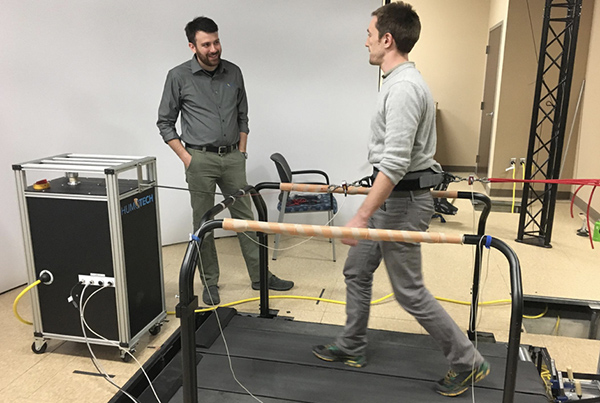
Malcolm and Caputo working on a waist-end effector
It will be exciting to see their biomechanics research translate to the manufacture and prescription of prosthetics and exoskeletons, taking us closer to one day realizing a seamless integration of assistive devices with the human body.